 2025-05-28
2025-05-28
If some students who have played with self-organized aerial cameras are reading this article, they may wonder: Why didn't you use pixhawk flight control, apm flight control or cheap qq flight control, which are common on aerial drones? The answer lies in the fact that the crossing machine mainly operates in pure manual mode, which mainly tests the speed of flight control from receiving the remote control signal to analyzing the remote control signal into motor control, as well as pid adjustment, filtering and other tasks. The calculation ability of flight control such as apm is relatively weak, and its weight and size are not suitable for crossing aircraft. We usually use f4 or f7 flight control with bf or inav firmware, but firmware such as emu, rf and falconx is also worth trying.
So what is firmware? Firmware is the operating system equivalent to flight control. Different firmware has different characteristics and functions. Just like linux and windows, unix and dos.
F7 or f4 flight control is still recommended. In any case, f4 is the configuration that needs to be achieved at least. First of all, from f4, the flight control performance has made a qualitative leap, which is enough to hang f3 and below, and it has stronger ability to calculate, process and control the attitude. Secondly, the new version of betaflight no longer supports f3, and f4, f7, h7, etc. are the flight controllers that are attached to the version (laughs).
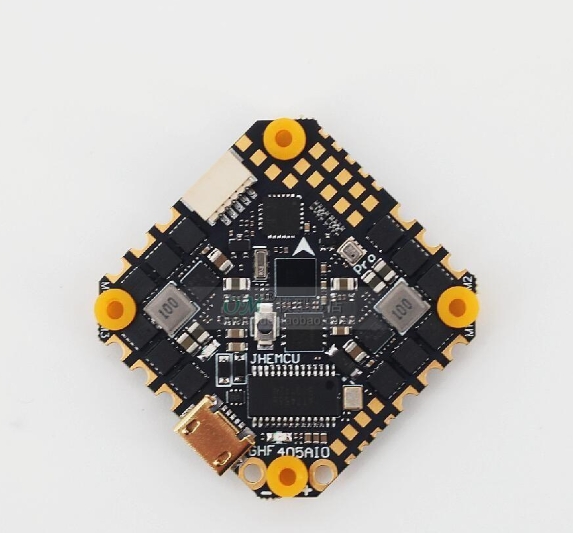
Flight control will generally be sold in the form of flying tower or aio. Remember to buy one that is compatible with the mounting aperture of the rack when purchasing (it will be explained in detail in the installation section). Flying towers usually combine flight control, image transmission and electrical adjustment. These components are integrated on several stacked circuit boards (as shown below), while aio is concentrated on one.
The selection of electric modulation mainly depends on the current it can provide to the motor and the communication mode with the flight control. A value, for example, 60a, is usually indicated on the instruction manual of electric tuning. This value represents the maximum current it can provide to the motor. And what is the communication mode between electronic control and flight control? For example, the electric modulation of many fixed-wing aircraft models is pwm. What does this pwm mean? It means that the electronic control communicates with the flight control through pwm analog signals. We'd better choose dshot communication protocol when we choose electro-tuning (provided that flight control supports it, generally speaking, we need f4 or above flight control), because their response speed is relatively fast, which will affect our feel when flying, and at the same time, it will also affect the use of functions such as flip after crash and rpm filtering.
There is a difference in the number of digits in the electronically controlled processor. Just like 32-bit and 64-bit computers, there are currently roughly 8-bit, 16-bit and 32-bit electronic tunes. The mainstream is still 16 and 32, and 8 people are really squatting. It is recommended to send them to the trash can. Anyway, the greater the number of digits, the more powerful the processing performance is, and the bigger it is, the better it will be.